
RGB-D 카메라 포즈 추정의 정확도 향상을 위한 깊이 맵 필터링 및 다중-레벨 예측자-수정자 방법
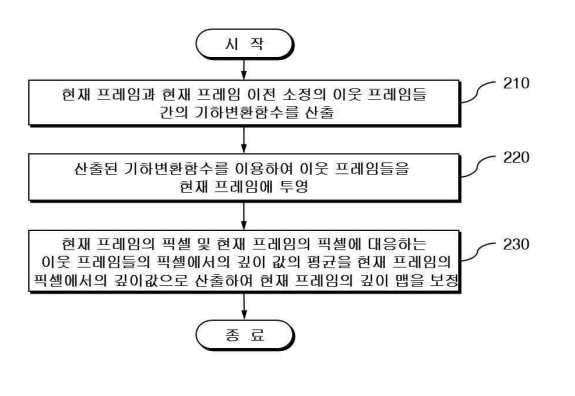
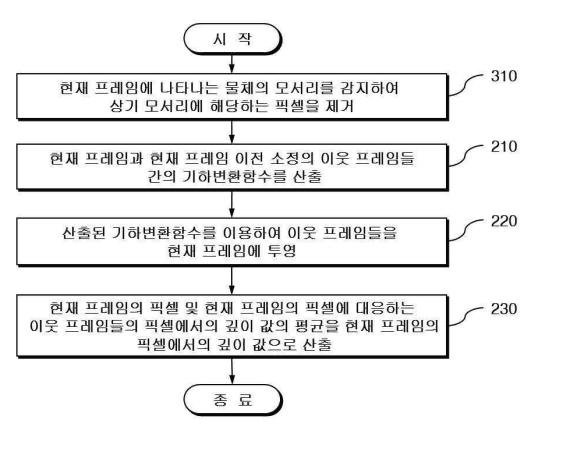
본 발명은 깊이 맵 보정방법에 관한 것으로서, 현재 프레임과 현재 프레임 이전 소정의 이웃 프레임들 간의 기하변환함수를 산출하는 단계, 산출된 기하변환함수를 이용하여 이웃 프레임들을 현재 프레임에 투영하는 단계, 및 현재 프레임의 픽셀 및 현재 프레임의 픽셀에 대응하는 이웃 프레임들의 픽셀에서의 깊이 값의 평균을 현재 프레임의 픽셀에서의 깊이 값으로 산출하여 현재 프레임의 깊이 맵을 보정하는 단계를 포함함으로써 여러 장의 깊이 맵에 대한 3차원 관계를 계산하고 이를 깊이 맵의 보정에 사용함으로써 3차원 모델을 유지하는 것과 유사한 효과를 만들 수 있고, 기준 프레임의 설정을 통해 오차의 누적 속도를 크게 감소시켜서 모든 카메라 궤적 추정 방법에서 큰 문제로 인식되는 오차의 누적을 줄일 수 있다.
상세 설명
기술분야
본 발명은 깊이 맵 보정 방법에 관한 것으로서, 더욱 상세하게는 깊이 맵 필터링 및 다중-레벨 예측자-수정자 방법을 이용한 깊이 맵 보정방법, 카메라궤적 추정방법, 및 그 장치에 관한 것이다.
해결하려는 과제
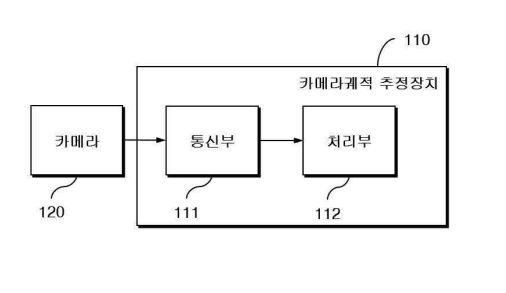
본 발명이 해결하고자 하는 첫 번째 과제는 깊이 맵 필터링을 이용하여 깊이 맵을 보정하는 방법을 제공하는 것 이다. 본 발명이 해결하고자 하는 두 번째 과제는 깊이 맵 필터링 및 다중-레벨 예측자-수정자 방법을 이용하여 카메 라궤적을 추정하는 방법을 제공하는 것이다. 본 발명이 해결하고자 하는 세 번째 과제는 깊이 맵 필터링 및 다중-레벨 예측자-수정자 방법을 이용하여 카메 라궤적을 추정하는 장치를 제공하는 것이다.
발명의 효과
본 발명에 따르면, 비교적 간단한 알고리즘과 적은 메모리 사용으로도 노이즈가 많은 저가형 RGB-D 카메라를 이 용해 카메라의 위치를 추정하는 과정에서 높은 정확도를 오랜 시간 동안 유지할 수 있다. 또한, 본 발명은 간단 한 알고리즘을 사용하기 때문에 많은 연산량을 필요로 하지 않고 보존해야 하는 정보의 양이 적어서 비교적 적 은 메모리를 사용한다. 이는 모바일 환경으로 발전하는데 큰 이점이 된다. 나아가, 깊이 맵의 보정을 통해 포인 트 클라우드의 품질을 높일 수 있기 때문에 3차원 물체 복원에도 강점을 보이며, 본 발명에서 제시하는 기법을 통해 깊이 맵을 보정하는 경우 디테일을 보존한 포인트 클라우드를 만들어 낼 수 있다.
거래 가격
1천만원 이하(가격 협의 가능)
판매 대리인
특허법인 위솔
연락처
02-2039-7610
SKU
임인성, 서강대학교산학협력단
첨부파일

WESOL은 고객 중심의 IP 토탈 솔루션을 제공합니다. 위솔의 IP 전문가들이 여러분의 든든한 성공 파트너가 되어 드리겠습니다.



특허법인 위솔, WESOL IP LAW FIRM
Copyright © 2024. All rights reserved.